An original long-form WN Magazine essay translating embodied automation from the far edge of White Noise Totality into tests, limits, interfaces, and stewardship.
This feature treats White Noise Totality as a generative source text rather than a literal product catalogue. The book supplies the far horizon: the White Noise Computer, the W.N. Chip, the Replicator, the Library of possible things, OSTSS habitats, the Digital Medical System, immortality research, Project Utopia, and a civilization trying to keep its ethics large enough for its tools. The article then walks back from that horizon to the questions a serious lab, studio, institution, or reader could actually use.
The public White Noise Inc. site turns the book into an ecosystem: products, Academy courses, Labs, the Exchange, Club, Syndicates, University planning, and the Grand Challenge all orbit the same premise. A magazine essay is strongest when it keeps those connections visible, because the technical claim, the educational path, the market layer, and the stewardship problem are never separate for long.
The central question is simple: if embodied automation were the north star, what would count as honest progress today? The answer is never a single breakthrough. It is a stack of measurements, interfaces, incentives, safeguards, and cultural choices that either make the vision more coherent or expose the place where it breaks.
The Claim Worth Testing
Seen from the prototype level, the section on the claim worth testing is less about spectacle than about how embodied automation behaves under constraint. A reader can treat the generalist body as a sketch of desire: what function should exist, and what would it cost to make honest? The most useful version of the premise is the one that can disappoint its own advocates. The risk worth naming is underestimating the physical world, so evidence has to remain more important than atmosphere. A serious reader does not need to choose between imagination and discipline. One honest dashboard would expose maintenance burden early, while the system is still small enough to correct.
A north-star idea earns its keep when it clarifies the next instrument, not when it demands belief. Without a visible account of material throughput, the system would turn ambition into opacity. The field version of the problem asks whether embodied automation can survive contact with instruments, operators, and review. In Robotics & Androids, progress has to pass through actuation, perception, batteries, dexterity, and reliability; otherwise the language becomes detached from the world it wants to change. The failure pattern to watch is underestimating the physical world, especially when a beautiful interface makes the system feel inevitable. Why Scale Does Not Erase Physics in Robotics & Androids therefore reads the book's horizon as a design brief with missing pages, not as a finished manual.
The question is not whether the premise is dazzling; the question is what research, governance, or learning path the premise can organize. The practical system would include human review, provenance, rollback, and a way to say no. For an institutional team, the section on the claim worth testing would begin as a protocol rather than as a declaration. A second milestone would track maintenance burden, because hidden cost is where speculative systems become socially expensive. The title's promise is useful only if it leads back to the blank pages a builder would have to fill. A weak version of the field would slide into underestimating the physical world; a serious version designs against that slide.
Where the Book Leaps
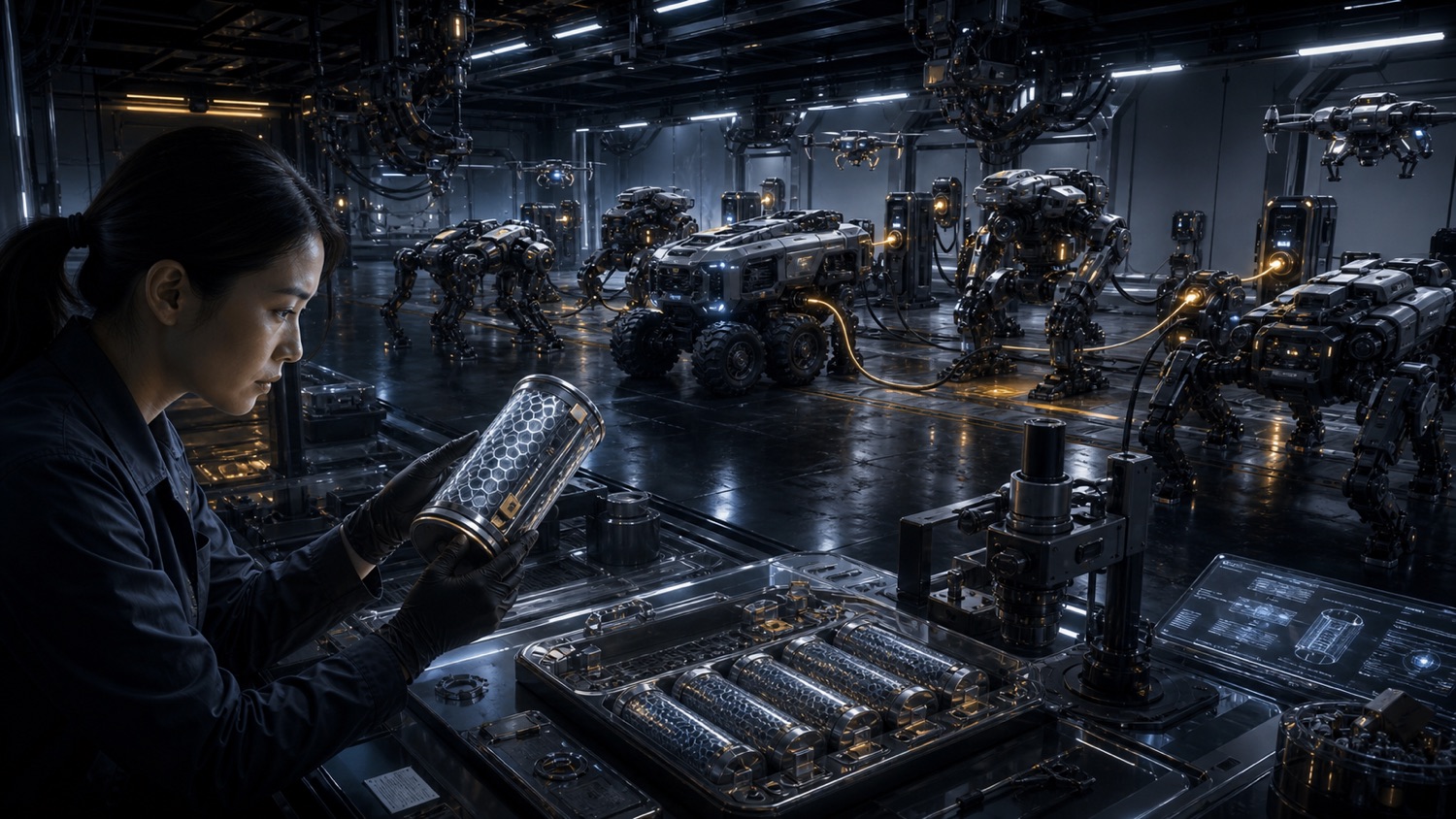
The same roadmap also needs a threshold for reversibility, or the promise will outrun accountability. At the planetary scale, the section on where the book leaps turns embodied automation from a luminous phrase into an operation that can be observed. A grounded program in Robotics & Androids would borrow from actuation, perception, batteries, dexterity, and reliability before claiming any White Noise-scale capability. Because underestimating the physical world is plausible, the work needs published limits as much as it needs demonstrations. The W.N. Chip and Replicator translate that premise into matter, where zero-point ambition has to answer to energy ledgers, thermodynamics, materials, maintenance, and atomic error rates. The imagined generalist body gives the essay a concrete object to test instead of leaving the idea as atmosphere.
Seen from the reader level, the section on where the book leaps is less about spectacle than about how embodied automation behaves under constraint. The article's wager is that a precise translation can preserve wonder without laundering uncertainty. The article's job is to unfold the leap without sneering at why the leap was attractive in the first place. One honest dashboard would expose maintenance burden early, while the system is still small enough to correct. OSTSS and the self-building settlement vision make the Totality program spatial: habitats, robotics, closed ecology, shielding, spin gravity, and construction loops become tests of whether abundance can maintain itself. Tracking interpretability keeps the work connected to use, maintenance, and public trust.
The strongest version of the dream is the one that survives contact with limits. The failure pattern to watch is underestimating the physical world, especially when a beautiful interface makes the system feel inevitable. OSTSS and the self-building settlement vision make the Totality program spatial: habitats, robotics, closed ecology, shielding, spin gravity, and construction loops become tests of whether abundance can maintain itself. The leap is deliberate: the book compresses a stack of unsolved problems into a single imagined capability. The generalist body matters here because it turns an abstract promise into something with edges, interfaces, and possible failure. Systems that claim total reach need unusually strong limits on access, retention, and authority.
The Grounded Version
It is less spectacular than the book's horizon, but it is also where useful work can begin. That double vision is the magazine's method: imagine at full scale, then return to the numbers. The title's promise is useful only if it leads back to the blank pages a builder would have to fill. The nearby disciplines are actuation, perception, batteries, dexterity, and reliability, and they give the speculation both vocabulary and resistance. The book offers the dramatic object, the generalist body, while the practical version asks for sensors, protocols, people, and stop rules. A weak version of the field would slide into underestimating the physical world; a serious version designs against that slide.
The same roadmap also needs a threshold for public legitimacy, or the promise will outrun accountability. The question is not whether the premise is dazzling; the question is what research, governance, or learning path the premise can organize. The imagined generalist body gives the essay a concrete object to test instead of leaving the idea as atmosphere. A practical translation should still feel connected to the dream, otherwise it becomes ordinary incrementalism. A grounded program in Robotics & Androids would borrow from actuation, perception, batteries, dexterity, and reliability before claiming any White Noise-scale capability. At the policy scale, the section on the grounded version turns embodied automation from a luminous phrase into an operation that can be observed.
One honest dashboard would expose maintenance burden early, while the system is still small enough to correct. A first prototype would reduce the claim to one measurable loop and make the failure visible. The article's wager is that a precise translation can preserve wonder without laundering uncertainty. A reader can treat the generalist body as a sketch of desire: what function should exist, and what would it cost to make honest? The grounded version keeps only the part that can be built, measured, taught, or governed. Seen from the cultural level, the section on the grounded version is less about spectacle than about how embodied automation behaves under constraint.
Prototype Discipline
In Robotics & Androids, progress has to pass through actuation, perception, batteries, dexterity, and reliability; otherwise the language becomes detached from the world it wants to change. If latency is hidden, the prototype teaches the wrong lesson no matter how elegant it looks. The prototype is not a miniature utopia; it is a truth machine. WN Academy, WN Labs, the Exchange, Club, and Syndicates make the speculative corpus operational as education, research, markets, community, and funding paths rather than only a book of far horizons. Systems that claim total reach need unusually strong limits on access, retention, and authority. The economic version of the problem asks whether embodied automation can survive contact with instruments, operators, and review.
The title's promise is useful only if it leads back to the blank pages a builder would have to fill. A second milestone would track error rate, because hidden cost is where speculative systems become socially expensive. Project Utopia is the human-facing interpretation of the stack: post-scarcity economics, reputation, education, governance, and shared flourishing are treated as design problems rather than slogans. The nearby disciplines are actuation, perception, batteries, dexterity, and reliability, and they give the speculation both vocabulary and resistance. The boundary matters because it protects both wonder and credibility. The book offers the dramatic object, the generalist body, while the practical version asks for sensors, protocols, people, and stop rules.
Prototype discipline means choosing the smallest loop that can reveal whether the idea has traction. The article treats the book as a map of questions, not as a catalogue of existing machines. The line between prototype and promise must stay bright. This essay keeps the name of the dream intact while asking what the name obligates a builder to prove. A grounded program in Robotics & Androids would borrow from actuation, perception, batteries, dexterity, and reliability before claiming any White Noise-scale capability. Every interface should reveal the cost of the transformation it offers.
The Measurement Layer
The ordinary sciences under the extraordinary claim are actuation, perception, batteries, dexterity, and reliability, which is why the first step is careful translation. From the book side, the recurring pattern is entanglement first, then computation, then matter, then medicine, then habitats, then governance; each layer inherits the risk of the layer before it. Seen from the prototype level, the section on the measurement layer is less about spectacle than about how embodied automation behaves under constraint. A serious reader does not need to choose between imagination and discipline. The article's wager is that a precise translation can preserve wonder without laundering uncertainty. One honest dashboard would expose maintenance burden early, while the system is still small enough to correct.
That double vision is the magazine's method: imagine at full scale, then return to the numbers. A system that cannot report what it failed to sense is already overstating itself. If latency is hidden, the prototype teaches the wrong lesson no matter how elegant it looks. The field version of the problem asks whether embodied automation can survive contact with instruments, operators, and review. The failure pattern to watch is underestimating the physical world, especially when a beautiful interface makes the system feel inevitable. Without a visible account of material throughput, the system would turn ambition into opacity.
The article treats auditability as a design material, because invisible costs become political facts later. The book offers the dramatic object, the generalist body, while the practical version asks for sensors, protocols, people, and stop rules. The strongest research culture would welcome a result that narrows embodied automation, because narrowed dreams are easier to build responsibly. Measurement protects the work from becoming mood, mythology, or marketing. That double vision is the magazine's method: imagine at full scale, then return to the numbers. Every interface should reveal the cost of the transformation it offers.
Energy, Latency, and Material Cost
Energy and latency are not dull implementation details; they decide what the system can ethically promise. The imagined generalist body gives the essay a concrete object to test instead of leaving the idea as atmosphere. In that sense the speculation behaves like a stress test for ordinary research assumptions. At the planetary scale, the section on energy, latency, and material cost turns embodied automation from a luminous phrase into an operation that can be observed. A grounded program in Robotics & Androids would borrow from actuation, perception, batteries, dexterity, and reliability before claiming any White Noise-scale capability. This essay keeps the name of the dream intact while asking what the name obligates a builder to prove.
The ordinary sciences under the extraordinary claim are actuation, perception, batteries, dexterity, and reliability, which is why the first step is careful translation. Tracking interpretability keeps the work connected to use, maintenance, and public trust. Seen from the reader level, the section on energy, latency, and material cost is less about spectacle than about how embodied automation behaves under constraint. WN Academy, WN Labs, the Exchange, Club, and Syndicates make the speculative corpus operational as education, research, markets, community, and funding paths rather than only a book of far horizons. A reader can treat the generalist body as a sketch of desire: what function should exist, and what would it cost to make honest? The article's wager is that a precise translation can preserve wonder without laundering uncertainty.
Every grand capability has a physical ledger, even when the interface hides it. The first deployment should be narrow, reversible, and useful even if the grand theory never arrives. The failure pattern to watch is underestimating the physical world, especially when a beautiful interface makes the system feel inevitable. A field that cannot describe its own failure modes is not ready for scale. Why Scale Does Not Erase Physics in Robotics & Androids therefore reads the book's horizon as a design brief with missing pages, not as a finished manual. The generalist body matters here because it turns an abstract promise into something with edges, interfaces, and possible failure.
Human Interfaces
The article treats auditability as a design material, because invisible costs become political facts later. The book offers the dramatic object, the generalist body, while the practical version asks for sensors, protocols, people, and stop rules. The nearby disciplines are actuation, perception, batteries, dexterity, and reliability, and they give the speculation both vocabulary and resistance. A second milestone would track consent, because hidden cost is where speculative systems become socially expensive. A weak version of the field would slide into underestimating the physical world; a serious version designs against that slide. The question is not whether the premise is dazzling; the question is what research, governance, or learning path the premise can organize.
The same roadmap also needs a threshold for public legitimacy, or the promise will outrun accountability. The useful milestone would make resilience visible to operators before it tried to claim total reach. The moral question arrives before the engineering is finished, not after. The user should understand the consequence of a command before the system makes the command feel effortless. A grounded program in Robotics & Androids would borrow from actuation, perception, batteries, dexterity, and reliability before claiming any White Noise-scale capability. Because underestimating the physical world is plausible, the work needs published limits as much as it needs demonstrations.
Project Utopia is the human-facing interpretation of the stack: post-scarcity economics, reputation, education, governance, and shared flourishing are treated as design problems rather than slogans. Tracking auditability keeps the work connected to use, maintenance, and public trust. The risk worth naming is underestimating the physical world, so evidence has to remain more important than atmosphere. The interface is where cosmic leverage becomes a human decision. The article's wager is that a precise translation can preserve wonder without laundering uncertainty. The ordinary sciences under the extraordinary claim are actuation, perception, batteries, dexterity, and reliability, which is why the first step is careful translation.
Failure Modes
Without a visible account of failure recovery, the system would turn ambition into opacity. The economic version of the problem asks whether embodied automation can survive contact with instruments, operators, and review. The generalist body matters here because it turns an abstract promise into something with edges, interfaces, and possible failure. If latency is hidden, the prototype teaches the wrong lesson no matter how elegant it looks. The catastrophic version is rarely the only danger; subtle overtrust can be more persistent. The moral question arrives before the engineering is finished, not after.
From the book side, the recurring pattern is entanglement first, then computation, then matter, then medicine, then habitats, then governance; each layer inherits the risk of the layer before it. The nearby disciplines are actuation, perception, batteries, dexterity, and reliability, and they give the speculation both vocabulary and resistance. The book offers the dramatic object, the generalist body, while the practical version asks for sensors, protocols, people, and stop rules. The title's promise is useful only if it leads back to the blank pages a builder would have to fill. The article treats auditability as a design material, because invisible costs become political facts later. A mature field learns to describe how its best tool can be misused.
A grounded program in Robotics & Androids would borrow from actuation, perception, batteries, dexterity, and reliability before claiming any White Noise-scale capability. Scale makes the problem more interesting, not easier. At the bench scale, the section on failure modes turns embodied automation from a luminous phrase into an operation that can be observed. The useful milestone would make resilience visible to operators before it tried to claim total reach. This essay keeps the name of the dream intact while asking what the name obligates a builder to prove. Failure modes deserve design attention before success stories do.
Governance Before Scale
One honest dashboard would expose maintenance burden early, while the system is still small enough to correct. Tracking energy cost keeps the work connected to use, maintenance, and public trust. The ordinary sciences under the extraordinary claim are actuation, perception, batteries, dexterity, and reliability, which is why the first step is careful translation. The article's wager is that a precise translation can preserve wonder without laundering uncertainty. The strongest version of the dream is the one that survives contact with limits. OSTSS and the self-building settlement vision make the Totality program spatial: habitats, robotics, closed ecology, shielding, spin gravity, and construction loops become tests of whether abundance can maintain itself.
The generalist body matters here because it turns an abstract promise into something with edges, interfaces, and possible failure. If latency is hidden, the prototype teaches the wrong lesson no matter how elegant it looks. The question is not whether the premise is dazzling; the question is what research, governance, or learning path the premise can organize. In Robotics & Androids, progress has to pass through actuation, perception, batteries, dexterity, and reliability; otherwise the language becomes detached from the world it wants to change. The failure pattern to watch is underestimating the physical world, especially when a beautiful interface makes the system feel inevitable. If a system changes shared reality, private preference cannot be its only steering mechanism.
The article treats auditability as a design material, because invisible costs become political facts later. The useful move is to keep the ambition visible while refusing to hide the constraint. The nearby disciplines are actuation, perception, batteries, dexterity, and reliability, and they give the speculation both vocabulary and resistance. A weak version of the field would slide into underestimating the physical world; a serious version designs against that slide. Any credible roadmap must identify what can be tested now, what requires a new instrument, and what would require new physics. The title's promise is useful only if it leads back to the blank pages a builder would have to fill.
What a Serious Lab Would Build
Because underestimating the physical world is plausible, the work needs published limits as much as it needs demonstrations. A grounded program in Robotics & Androids would borrow from actuation, perception, batteries, dexterity, and reliability before claiming any White Noise-scale capability. The more powerful the imaginary tool becomes, the more important consent and reversibility become. The first build should be useful even if the grand theory never matures. Project Utopia is the human-facing interpretation of the stack: post-scarcity economics, reputation, education, governance, and shared flourishing are treated as design problems rather than slogans. The useful milestone would make resilience visible to operators before it tried to claim total reach.
One honest dashboard would expose maintenance burden early, while the system is still small enough to correct. The ordinary sciences under the extraordinary claim are actuation, perception, batteries, dexterity, and reliability, which is why the first step is careful translation. In that sense the speculation behaves like a stress test for ordinary research assumptions. Seen from the reader level, the section on what a serious lab would build is less about spectacle than about how embodied automation behaves under constraint. Tracking interpretability keeps the work connected to use, maintenance, and public trust. A reader can treat the generalist body as a sketch of desire: what function should exist, and what would it cost to make honest?
Why Scale Does Not Erase Physics in Robotics & Androids therefore reads the book's horizon as a design brief with missing pages, not as a finished manual. In that sense the speculation behaves like a stress test for ordinary research assumptions. The operator version of the problem asks whether embodied automation can survive contact with instruments, operators, and review. Systems that claim total reach need unusually strong limits on access, retention, and authority. The strongest research culture would welcome a result that narrows embodied automation, because narrowed dreams are easier to build responsibly. The failure pattern to watch is underestimating the physical world, especially when a beautiful interface makes the system feel inevitable.
What Survives Translation
The title's promise is useful only if it leads back to the blank pages a builder would have to fill. A weak version of the field would slide into underestimating the physical world; a serious version designs against that slide. The book offers the dramatic object, the generalist body, while the practical version asks for sensors, protocols, people, and stop rules. The surviving idea is not a consolation prize; it is the part reality was willing to negotiate with. The nearby disciplines are actuation, perception, batteries, dexterity, and reliability, and they give the speculation both vocabulary and resistance. That double vision is the magazine's method: imagine at full scale, then return to the numbers.
Scale makes the problem more interesting, not easier. Because underestimating the physical world is plausible, the work needs published limits as much as it needs demonstrations. A grounded program in Robotics & Androids would borrow from actuation, perception, batteries, dexterity, and reliability before claiming any White Noise-scale capability. The more powerful the imaginary tool becomes, the more important consent and reversibility become. The same roadmap also needs a threshold for public legitimacy, or the promise will outrun accountability. This essay keeps the name of the dream intact while asking what the name obligates a builder to prove.
The most useful version of the premise is the one that can disappoint its own advocates. The W.N. Chip and Replicator translate that premise into matter, where zero-point ambition has to answer to energy ledgers, thermodynamics, materials, maintenance, and atomic error rates. Systems that claim total reach need unusually strong limits on access, retention, and authority. Why Scale Does Not Erase Physics in Robotics & Androids therefore reads the book's horizon as a design brief with missing pages, not as a finished manual. The failure pattern to watch is underestimating the physical world, especially when a beautiful interface makes the system feel inevitable. Without a visible account of failure recovery, the system would turn ambition into opacity.
The risk worth naming is underestimating the physical world, so evidence has to remain more important than atmosphere. What survives translation is often smaller, stranger, and more fundable than the original premise. In that sense the speculation behaves like a stress test for ordinary research assumptions. The article's wager is that a precise translation can preserve wonder without laundering uncertainty. A reader can treat the generalist body as a sketch of desire: what function should exist, and what would it cost to make honest? Tracking auditability keeps the work connected to use, maintenance, and public trust.